My old friend Bob is in Chicago for a few days and I promised him a sail. Today was lovely, sunny, not too cold and a 15-20 knot SW breeze with some heavier puffs.
I haven’t gone out sailing in more than a week. Was busy getting all the electrics and electronics sorted, and have been helping with a couple of projects in the boat yard, including helping to re-commission this Southern Cross 52. It’s a cool boat, like a giant Tin Lizzie.

I picked Bob up downtown, then we sailed there from Calumet. Put up the reaching spinnaker for a fast ride north.
I wasn’t having any trouble keeping the boat under the rig with the sheets cleated on a broad reach while hand steering. The spinnaker is pretty forgiving on trim. We were blasting along at 10-13 knots. The autopilot didn’t do as well. We had a couple of slow motion roundups under AP. It took a bit of doing to get the boat going back downwind. I’m sure filling the windward ballast tank would have helped a lot.
A few times we sailed through the back of a wave and took solid water back to the cockpit. Pretty fine bow. Again, I’m sure ballast would have helped.
Bob and I had our PFDs on. I was wearing my auto-inflate vest and he had a house vest on.
I was trying to do things myself, and was on the leeward side trying to get the spinnaker sheet under the boom in preparation for a takedown when we broached again under AP. I found myself lying in the water with the lifelines under me, looking up at Bob who was clinging to the high side. The cockpit is close to 10′ wide at that point.
My life vest inflated with a big pop, and that didn’t help my mobility. So I focused on staying inside the boat, grabbing a stanchion and kicking around to make sure I was straddling the middle lifeline.
After a few seconds the boat popped up to maybe a 30 degree heel, Bob reached down to help me get back up, and we were off again. I stayed at the helm and instructed Bob on the takedown.
We reached into Monroe Harbor under main, and I dropped Bob off and sailed back to Crowley’s. If I’d been ambitious I would have put a reef in and raised the small jib, but I’d had enough action for the day.
The old main is toast. We gave it a good thrashing and it now has three or four major holes and a torn batten pocket. It’s more tired than I had originally thought. I’m also very concerned about my ability to handle the sail while hoisting and dropping. It’s a big sail with long battens. I guess I’ll be exploring having slugs put on the newer main.
Sorry no pics. I had wisely emptied my pockets of electronic devices on the way out.
I’m quite happy with the remote for the AP, and my nav area that I’ve built.

I was thinking about jack lines today and think I have a plan. Will run them tomorrow and pick out a harness and tethers. I want to make sure I fetch up inside the boat if I get thrown or swept the wrong way as I did today.
I wasn’t originally planning on a challenge of this magnitude. It’s pretty cool to think I could be sailing straight up the lake right now with average speed into the teens. But hard to imagine it being sustainable all the way.
I do want to try to get wind data to the autopilot. Everything I read says it’ll help, particularly down wind. I really don’t want to be steering.
I also still have to do my 24 hour solo sail. Weather looks fair and gentle starting Sunday so will likely head out then.
Here are some pics of recent work. I bought some stick-on dimmable LED lights and hung the AP remote holster and VHF mic at the companionway.

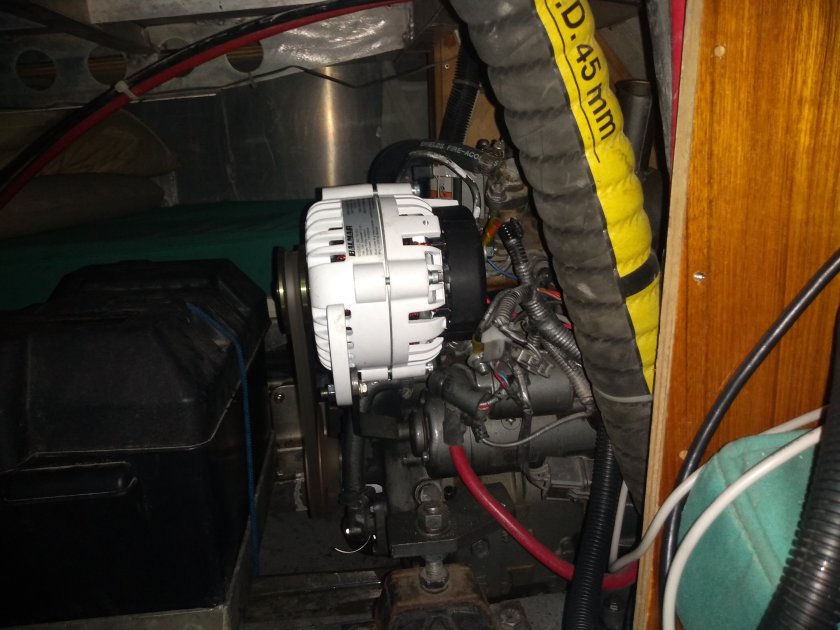
A new Balmar 70 amp alternator and external regulator. Have a new group 31 AGM battery and Balmar SG200 monitor, which allows me to monitor consumption and charge rates and battery SoC and health. There is a switch at the nav station that reduces full power alternator output by 50% as it’s only a 9 hp motor. So I can do heavy bulk charging when sailing but cut back when under power.
Radar seems to work fine when heeled. I also mounted a new GPS antenna, as the reception inside the boat is terrible.

I changed the running lights to LED. Also mounted a second antenna to the stern rail, normally dedicated to AIS reception but available for VHF if dismasted.

This is my emergency power supply, has 12 with jump and USB.

No pics, but with the exception on the old wind instruments everything is networked on NMEA 2000 and/or Seatalk NG and I’ve combined the two into a single network. Seems to be working as expected. Using routing to drive the AP is not allowed in GLSS events, and I haven’t tried it yet but assume it will be functional. Lots of data to play with!




















